CANnect is a fieldbus gateway designed for flexible communication via CAN, CAN FD, LIN and Ethernet. Applications include the integration and simulation of control units (ECUs) as well as sensor systems used in the automotive sector (for example, HiL / EoL test benches, component testing and vehicle prototypes). The gateway facilitates flexible cross mapping of hardware interfaces, messages and signals. Furthermore, it is also possible to generate desired messages, including bus data error detection (for example checksums, alive counter, CRC) for a restbus simulation. High levels of flexibility ensure it is possible to deploy CANnect in any onboard network or E/E architecture.
NEW: CAN FD extension module – More information
Note: All hardware and software features are optionally available to create individually customized combinations (for example, CANnect gateway base module with 3 CAN and 1 Ethernet interface).
* Required for this feature: CAN FD extension module
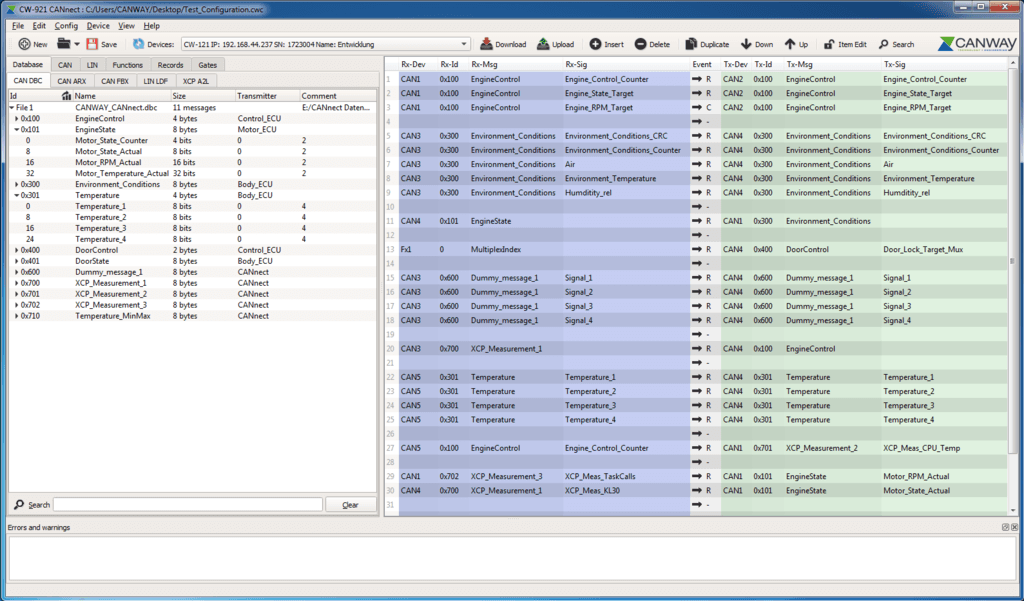
With the intuitively designed configuration software CW-921 it is possible to map and comprehensively configure messages and signals according to requirements. The routing features of the gateway are implemented in the so-called cross links via user-friendly drag-and-drop operations, see figure opposite.
By reading in a bus description file (LDF, DBC, A2L, ARXML or Fibex) the user is able to define the messages, signals and measured quantities it contains to configure mappings and formulas according to requirements. It is possible to configure each message / signal to be issued on any bus system, to be used for calculations or to trigger other messages. Users are also able to implement filters between different bus systems.
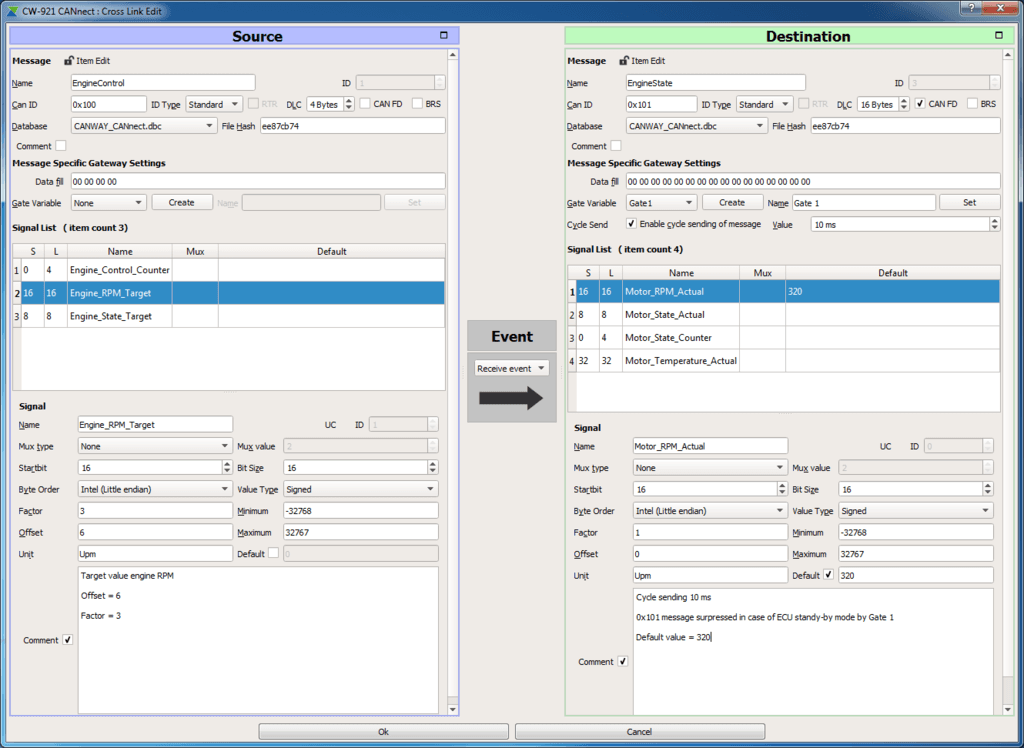
It is possible to reference the lowest low-level signal for each cross link, see figure opposite. That makes CANnect very flexible with regard to configuring all input and outputs.
An integrated formula editor makes comprehensive operations available to manipulate individual signals (including: arithmetic operations on the physical level, Boolean bit operations, signal comparisons, absolute value and delta functions, min/max calculations as well as a circular buffer for messages).
In addition, it is possible to configure in advance popular data error detection methods such as CRC and checksum computations (for example, according to an Autosar profile). Utilizing lookup tables it is possible to retrieve additionally stored key value pairs regarding runtime for dynamic operations.
In addition to communication on the bus systems CAN, LIN and Ethernet, CANnect also supports the XCP protocol (Universal Measurement and Calibration Protocol). After an A2L description file is read in the defined measurements and characteristics it contains can be incorporated into the configuration and linked with messages and signals on other bus systems. In doing so, CANnect takes over the entire communication with the remote XCP station. After a configuration has been transferred, both the CANnect standalone module and routing run in real time.
Is your application missing a decisive feature? The CANnect hardware platform offers numerous options to implement customer-specific extensions to your hardware and software. Please feel free to let us know what you are looking for.
| Number: | 6, galvanically isolated up to 1 kV |
| Type: | 4 CAN ISO 11898-2 (high-speed) |
| Bitrate: | High speed up to 1 Mbit/s*; low speed up to 125 kbit/s*; configurable via software |
| Termination: | Configurable for each CAN via Software |
| Number: | 2, configurable master/slave mode |
| Type: | LIN specification up to 2.1 |
| Transmission rate: | Up to 20 kbit/s |
| Number: | 1 |
| Type: | IEEE 802.3 |
| Transmission rate: | Up to 100 Mbit/s* |
| Number: | 8 |
| Input level: | 0 - 24 VDC |
| High level: | > 5 VDC |
| Supply voltage: | 9 - 36 VDC |
| Power consumption: | 8 W |
| Temperature range: | -20 °C to 60 °C |
| Number: | 12: Power (1), Active (1), LIN-Master/ Slave-Mode (2), CAN high speed/low speed (2) , CAN Termination (6) |
| Housing: | Rugged aluminium housing |
| Dimensions: | 27,5 mm x 87 mm x 140 mm (height x width x length) |
| Connectors: | 50 pole D-sub, connection cable optional, customer-specific modifications on request |
| Special features: | Support for DIN-hat rail on request; protective cover optional |
| Type: | Configuration software for 32 and 64 bit; intuitive operating concept for quick and user-friendly configuration of the gateways (standalone) |
| Features: |
|
*Specification of the physical bus data rate. The total processable data throughput may be lower depending on the number of channels, messages and signals used, the bus load and the complexity of the configured data processing.