CANnect ist ein Feldbus-Gateway für flexible Kommunikation via CAN, CAN FD,LIN und Ethernet. Einsatzgebiete sind u.a. die Integration und Simulation von Steuergeräten (ECU) und Sensorsystemen im Bereich Automotive (z.B. HiL-/EoL-Prüfstande, Komponenten-Testing oder Fahrzeug-Protoypen). Mit dem Gateway können flexibel Hardware-Schnittstellen, Botschaften und Signale untereinander gemappt werden. Darüber hinaus lassen sich beliebige Botschaften inkl. Bus-Absicherung (z.B. Checksummen, Alive-Counter, CRC) für eine Restbussimulation generieren. Durch die hohe Flexibilität ist es möglich, das CANnect in einer beliebigen Bordnetz- bzw. E/E-Achitektur zu verwenden.
Datenblatt | Telefon | Mail
NEU: CAN FD Erweiterungsmodul Mehr erfahren >
Hinweis: Sämtliche Hard- und Software Features sind optional verfügbar und können individuell zusammengestellt werden (z.B. CANnect Gateway Basismodul mit 3 CAN- und 1 Ethernet Interface).
*Für dieses Feature erforderlich: CAN FD Erweiterungsmodul
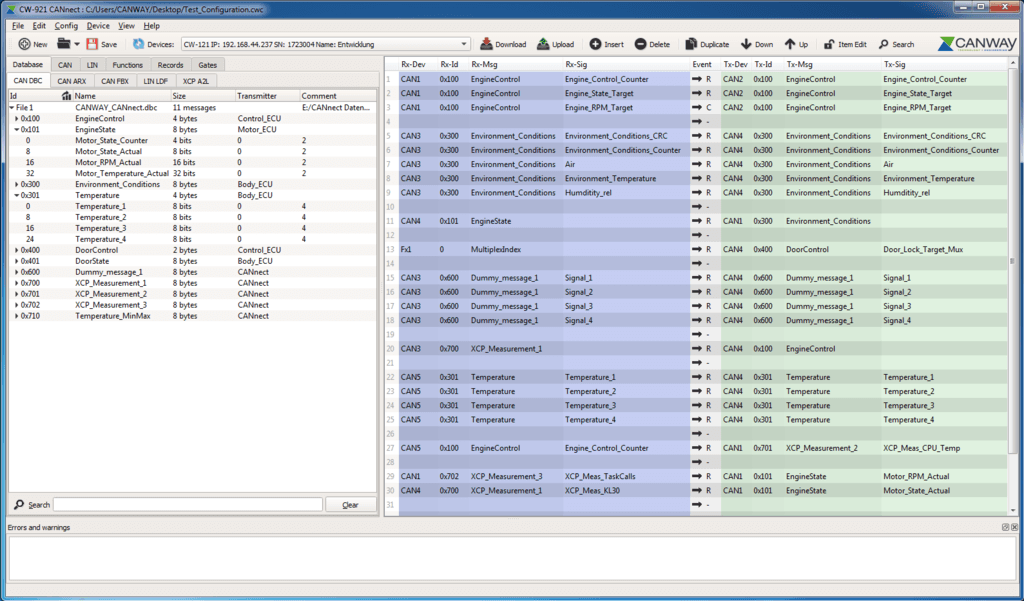
Durch die intuitiv gestaltete Konfigurationssoftware CW-921 können Botschaften und Signale beliebig gemappt und umfangreich konfiguriert werden. Die Routing-Eigenschaften des Gateways werden komfortabel via Drag-and-Drop - in den sogenannten Cross Links - durchgeführt, siehe Abbildung rechts.
Durch das Einlesen einer Bus-Beschreibungsdatei (LDF, DBC, A2L, ARXML oder Fibex) können die darin definierten Botschaften, Signale und Messgrößen frei zur Konfiguration der Mappings und Formeln verwendet werden. Jede Botschaft/Signal kann auf beliebigen Bussen ausgegeben, für Berechnungen genutzt oder als Trigger für andere Botschaften konfiguriert werden. Ebenso lassen sich Filter zwischen verschiedenen Bussystemen implementieren.
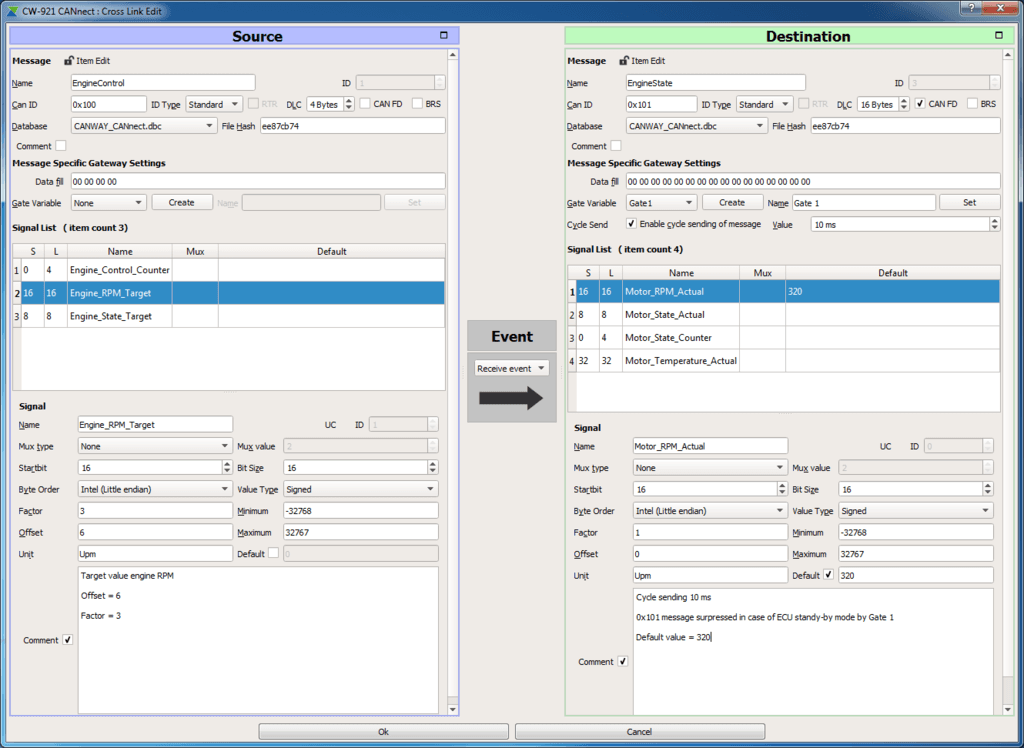
Für jede Verknüpfung (Cross Link) - kann auf tiefster Signal Low-Level-Ebene zugegriffen werden, siehe Abbildung links. Dadurch wird das CANnect sehr flexibel hinsichtlich der Konfiguration für sämtliche Ein- und Ausgänge.
Ein integrierter Formeleditor stellt umfassende Operationen zur Manipulation der einzelnen Signale zur Verfügung (u.a.: arithmetische Operationen auf physikalischer Ebene, boolsche Bitoperationen, Signal Vergleiche, Betrags- und Deltafunktion, Min/Max-Berechnungen und Botschafts-
Ringspeicher). Darüber hinaus, können gängige Absicherungsmethoden wie CRC- und Checksummenberechnungen (z. B. nach Autosar Profil) vorab konfiguriert werden. Anhand von Lookup-Tabellen können zusätzlich hinterlegte Schlüssel-Wert-Paare zur Laufzeit abgerufen und dynamisch genutzt werden.
Neben der Kommunikation auf den Bus-Systemen CAN, LIN und Ethernet, unterstützt das CANnect auch das XCP-Protokoll (Universal Measurement and Calibration Protocol). Nach dem Einlesen einer A2L-Beschreibungsdatei können die darin definierten Measurements und Characteristics in die Konfiguration einbezogen und mit Botschaften und Signalen auf anderen Bussystemen verknüpft werden. Das CANnect übernimmt dabei die gesamte Kommunikation mit der XCP-Gegenstelle. Nach der Übertragung einer Konfiguration arbeitet das CANnect Stand-Alone und das Routing erfolgt in Echtzeit.
Fehlt Ihnen ein entscheidenens Feature für Ihre Applikation? Die Hardwareplattform CANnect bietet zahlreiche Möglichkeiten, kundenspezifische Erweiterungen für Hard- und Software zu realisieren. Teilen Sie uns gerne Ihre Wünsche mit.
| Anzahl: | 6, galvanisch getrennt bis 1 kV |
| Typ: | 4 CAN-Highspeed |
| Datenrate: | Highspeed bis 1 Mbit/s*, Lowspeed bis 125 kBit/s* |
| Terminierung: | für jeden CAN über Software konfigurierbar |
| Anzahl: | 2, Master-/Slave-Mode konfigurierbar |
| Typ: | LIN-Spezifikation bis 2.1 |
| Datenrate: | bis zu 20 kbit/s |
| Anzahl: | 1 |
| Typ: | IEEE 802.3 |
| Datenrate: | bis zu 100 Mbit/s* |
| Anzahl: | 8 |
| Eingangspegel: | 0 - 24 VDC |
| High-Pegel: | > 5 VDC |
| Betriebsspannung: | 9 - 36 VDC |
| Leistungsaufnahme: | 700 mA bei 12 VDC |
| Temperaturbereich: | -20 °C bis 60 °C |
| Anzahl: | 12: Power (1), Active (1), LIN-Master/ Slave-Mode (2), CAN Highspeed/Lowspeed (2) , CAN-Terminierung (6) |
| Gehäuse: | Robustes Aluminiumgehäuse |
| Abmessungen: | 27,5 mm x 87 mm x 140 mm (Höhe x Breite x Länge) |
| Steckverbinder: | 50 pol. D-Sub, Anschlusskabel optional verfügbar, kundenspezifische Anpassungen auf Anfrage |
| Besonderheiten: | Aufhängung für DIN-Hutschiene auf Anfrage, Schutzhülle optional erhältlich |
| Typ: | Konfigurationssoftware für 32 und 64 bit; Intuitives Bedienkonzept zur schnellen und übersichtlichen Konfiguration des Gateways (Stand-Alone) |
| Leistungsumfang: |
|
*Spezifikation der physikalischen Busdatenrate. Der insgesamt verarbeitbare Datendurchsatz kann abhängig von der Anzahl der genutzten Kanäle, Nachrichten und Signale, der Buslast und der Komplexität der konfigurierten Datenverarbeitung geringer ausfallen.